
引き続きPyTorch Tutorialを見て行きます。今回は、NEURAL NETWORKSです。(以下翻訳です)
Neural Network
NNはtorch.nn packageを使って構築します。
前回autogradの勉強をしましたので、modelを定義し勾配計算を行う際にnnがautogradに依存していることは理解されていると思います。nn.Moduleはlayerを構成し、forward(input) methodは出力を返します。
下の手書き文字認識のnetworkを見てみましょう: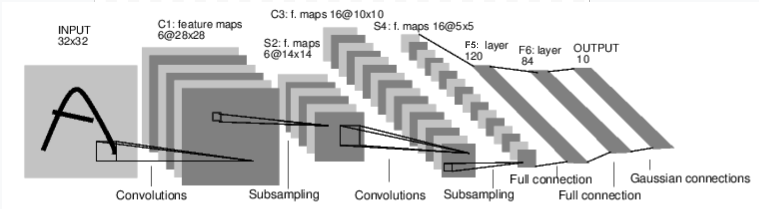
convnet
簡単なfeed-forward networkです。入力があり、それをいくつかのlayerにつぎつぎに手渡していき、最後に出力を得ます。
NNにおける典型的な学習過程は以下の通りです:
- 学習可能な変数(あるいは重み)をもつNNを定義する
- データセットを繰り返し入力する
- 入力をnetworkで処理する
- lossを計算する(出力が正解からどれだけ離れているか)
- Networkの変数に勾配を逆伝搬して行きます
- Networkの重みを更新します。通常は簡単な更新規則で行われます: weight = weight – learning rate * gradient
Networkの定義
以下のようなnetworkを定義します:
import torch
import torch.nn as nn
import torch.nn.functional as F
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
# 1 input image channel, 6 output channels, 3x3 square convolution
# kernel
self.conv1 = nn.Conv2d(1, 6, 3)
self.conv2 = nn.Conv2d(6, 16, 3)
# an affine operation: y = Wx + b
self.fc1 = nn.Linear(16 * 6 * 6, 120) # 6*6 from image dimension
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, x):
# Max pooling over a (2, 2) window
x = F.max_pool2d(F.relu(self.conv1(x)), (2, 2))
# If the size is a square you can only specify a single number
x = F.max_pool2d(F.relu(self.conv2(x)), 2)
x = x.view(-1, self.num_flat_features(x))
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
def num_flat_features(self, x):
size = x.size()[1:] # all dimensions except the batch dimension
num_features = 1
for s in size:
num_features *= s
return num_features
net = Net()
print(net)
Out:
Net(
(conv1): Conv2d(1, 6, kernel_size=(3, 3), stride=(1, 1))
(conv2): Conv2d(6, 16, kernel_size=(3, 3), stride=(1, 1))
(fc1): Linear(in_features=576, out_features=120, bias=True)
(fc2): Linear(in_features=120, out_features=84, bias=True)
(fc3): Linear(in_features=84, out_features=10, bias=True)
)
forward関数を定義すれば、勾配計算を行うbackward関数はautogradで自動的に定義されます。forward関数ではすべてのtensor演算を使用できます。
Model内の学習可能な変数はnet.parameters()で確認できます。
params = list(net.parameters())
print(len(params))
print(params[0].size()) # conv1's .weight
Out:
10
torch.Size([6, 1, 3, 3])
32×32のrandomな入力を試してみましょう。このnetwork (LeNet)は32×32の入力サイズを仮定しているので、このnetworkでMNIST datasetを使う際は個々のdataのsizeを32×32にresizeしてください。
input = torch.randn(1, 1, 32, 32)
out = net(input)
print(out)
Out:
tensor([[ 0.1464, 0.0673, -0.0185, 0.0048, 0.1427, -0.0866, -0.0237, -0.0991,
-0.0903, 0.0886]], grad_fn=<AddmmBackward>)
すべての変数の勾配値をzeroで初期化し、randomな勾配値で逆伝搬させます:
net.zero_grad()
out.backward(torch.randn(1, 10))
Note: torch.nnはmini-batchのみ利用可能、すなわちtorch.nn packageではおしなべてsample dataのmini-batchのみを入力として扱います。単一のsample dataは入力として受け付けません。
たとえば、nn.Conv2dはn Sample x m Channel x Height x Widthの4次元tensorを取り込みます。
単一sample dataを喰わせたい場合は、input.unsqueeze(0)を使うことによりbatchの次元をだまし、扱うことができます。
先に進む前に、ここまでの要点を振り返っておきましょう:
- torch.Tensor – backward()のようなautograd演算がsupportされた複数次元arrayのこと。Tensorの勾配も保持する。
- nn.Module – Neural network moduleのこと。GPUへのmoveやexport, loadなど変数を扱う上で便利な機能を持つ。
- nn.Parameter – Tensorのようなもの。Moduleに属性が指定された際に変数として自動的に登録される。
- autograd.Function – autograd演算のforwardやbackward機能の実装がある。すべてのtensor演算は少なくともひとつのFunctionを持ち、tensorやその履歴を生成保持する機能を持つ。
以下の説明が終わりました:
- NNの定義
- 入力を処理し、backwardを呼ぶ
これから以下の説明をはじめます:
- lossの計算
- Networkの重みの更新
Loss関数
Loss関数は(output, target)のpairを入力として持ち、出力が目標値からどれだけ離れているかを推定し、その距離を数値として計算します。
nn packageにはいくつかのloss関数があります。簡単なlossとしてはnn.MSELossがあり、出力と目標値の二乗平均誤差を用います。
例:
output = net(input)
target = torch.randn(10) # a dummy target, for example
target = target.view(1, -1) # make it the same shape as output
criterion = nn.MSELoss()
loss = criterion(output, target)
print(loss)
Out:
tensor(1.0942, grad_fn=<MseLossBackward>)
逆伝搬の中でlossを追跡したい場合は、.grad_fn属性を見ることにより、以下のような計算graphを得ます:
input -> conv2d -> relu -> maxpool2d -> conv2d -> relu -> maxpool2d
-> view -> linear -> relu -> linear -> relu -> linear
-> MSELoss
-> loss
loss.backward()が呼ばれるとすべてのgraphのlossが微分され、requires_grad=Trueが指定されたすべてのtensorの.grad tensorに勾配値が蓄積されます。
逆伝搬stepを少し可視化してみましょう:
print(loss.grad_fn) # MSELoss
print(loss.grad_fn.next_functions[0][0]) # Linear
print(loss.grad_fn.next_functions[0][0].next_functions[0][0]) # ReLU
Out:
<MseLossBackward object at 0x7fe290dfb390>
<AddmmBackward object at 0x7fe290dfb978>
<AccumulateGrad object at 0x7fe290dfb978>
逆伝搬
loss.backward()を呼ぶと、誤差が逆伝搬します。今ある勾配情報をclearしなければ、今ある情報に新しい勾配値が追記されます。
ここで、loss.backward()を呼んだときのconv1のbias勾配の変化を見てみましょう。
net.zero_grad() # zeroes the gradient buffers of all parameters
print('conv1.bias.grad before backward')
print(net.conv1.bias.grad)
loss.backward()
print('conv1.bias.grad after backward')
print(net.conv1.bias.grad)
Out:
conv1.bias.grad before backward
tensor([0., 0., 0., 0., 0., 0.])
conv1.bias.grad after backward
tensor([-0.0068, -0.0244, 0.0278, -0.0142, 0.0111, -0.0078])
以上がloss関数の動作でした。
追加情報: 深層NNを構築するために、NN packageにはさまざまな種類のmoduleやloss関数が用意されています。一覧と説明はこちらを参照ください。
残るはこちらです:
- Networkの重みの更新
重みの更新
最も簡単で実用的な更新規則は、確率的勾配降下法(Stochastic Gradient Descent (SGD))です: weight = weight – learning_rate * gradient
簡単なPython codeでこれを実現できます:
learning_rate = 0.01
for f in net.parameters():
f.data.sub_(f.grad.data * learning_rate)
しかしながら、NNを扱う場合、SGD以外にもNesterov-SGD, Adam, RMSPropなどさまざまな更新規則を使いたいと思います。torch.optimという小さなpackage にこれらすべての実装が用意されています。使い方は簡単です:
import torch.optim as optim
# create your optimizer
optimizer = optim.SGD(net.parameters(), lr=0.01)
# in your training loop:
optimizer.zero_grad() # zero the gradient buffers
output = net(input)
loss = criterion(output, target)
loss.backward()
optimizer.step() # Does the update
Note: なぜ勾配bufferを明示的にoptimizer.zero_grad()でzero clearしているのかと言うと、逆伝搬のsectionで説明したとおり、clearしないと過去の勾配値が蓄積されるからです。
全Scriptの計算時間: ( 0 minutes 0.045 seconds)
さいごに
勉強になりましたね ? 結構細かいtipsが散りばめられていたと思います。次回でこのblitzは最後になりますが、引き続きTutorialを見て行きましょう !